A challenging scenario for any mobility application is when small objects are in the drivable area. These obstacles can be static, like tire debris or cinder blocks, or dynamic, like small animals darting across the road at night. To solve for these scenarios, automotive and mobility companies devise a set of torture tests for sensors to see how well they can detect small, hard-to-see objects in low signal-to-noise environments.
Each of the commonly used sensing modalities have their own challenges in detecting such objects. Radar simply does nothave enough angular resolution to detect small objects in a scene. Cameras suffer from the lack of sufficient signal, especially in low-light conditions, given standard exposure times. Lidar sensors, the sensor of choice to solve for this problem, need to be very high resolution and long range, making them too expensive for most applications.

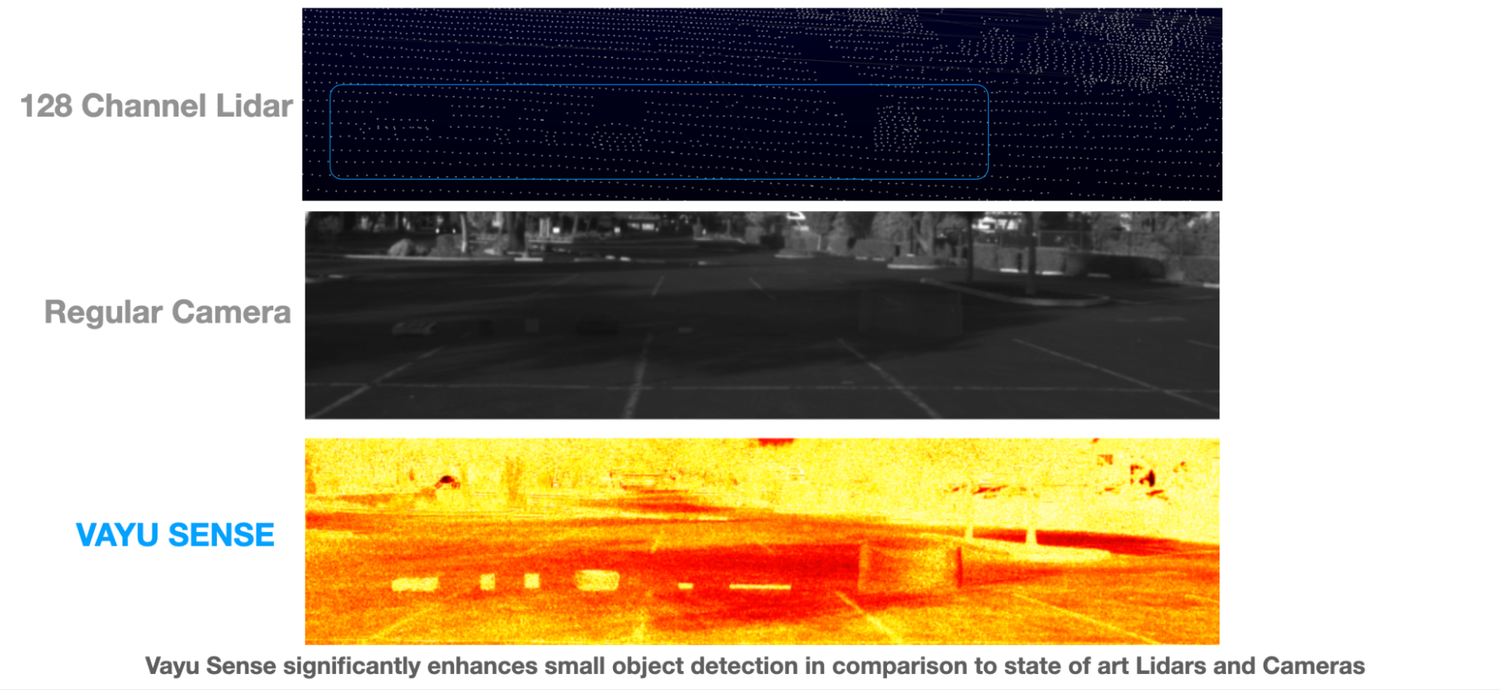
The figure above shows commonly used targets for testing small object detection. The objects in the scene include a wooden pallet, cinder blocks of varying reflectivity, a black tire, a brick, a metal rod and a mesh fence. For the test, we used a 128-channel high resolution lidar, a camera with exposure settings adjusted to eliminate low-light motion blur, and a Vayu Sense with the exact same exposure settings as the camera. As you can see, the results are startling. Vayu Sense was able to detect all targets with very high resolution and strong signal.
How is Vayu Sense able to do this? We directly extract the shapes of the objects in question by interrogating other properties of the received light. This provides a much stronger signal than received intensity or lidar's measured depth. This is a a powerful technique that can not only make cars safer in many scenarios but also has potential for reducing the compute burden by providing the ability to generate occupancy maps right at the sensor edge.
Staying with the theme of detecting challenging objects, another situation that trips up indoor robots is the presence of glass. Neither cameras nor lidar sensors do a good job of perceiving the presence of glass or the depth behind it. Cameras can often miss glass completely, and lidar can have a hard time disambiguating very clean glass surfaces, even with multiple return functionality.
Vayu Sense solves this issue by differentiating between photons that reflect from the glass surface versus those that reflect from the scene behind. By doing this, Vayu Sense can segment the glass surface, detect its depth accurately, and separately extract depth behind the glass, as shown by the image above. This is an exciting development that can enable robotic solutions to function in indoor glass filled environments such as retail spaces, offices and malls.

